OVERTAKING SIGHT DISTANCE
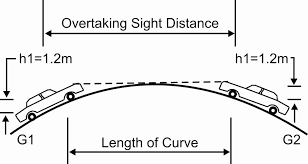
The overtaking sight distance is the minimum distance open to the vision of the driver of a vehicle intending to overtake the slow vehicle ahead safely against the traffic in the opposite direction.
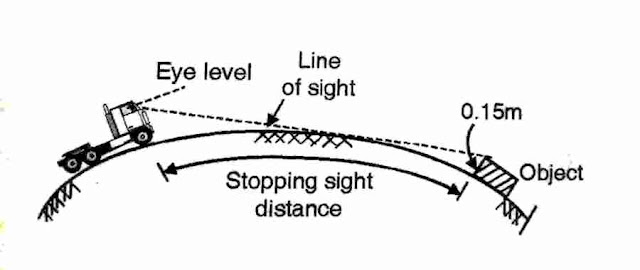
The overtaking sight distance passing sight distance is measured along the center line of the road over which a driver with his eye level 1.2m above the road surface can see the top of an object 1.2m above the road surface.
The factors that affect the OSD are:
- Velocities of the overtaking vehicle, overtaken vehicle and of the vehicle coming in the opposite direction
- Spacing between vehicles, which in turn depends on the speed
- Skill and reaction time of the driver
- Rate of acceleration of overtaking vehicle
- Gradient of the road
Analysis of overtaking sight distance
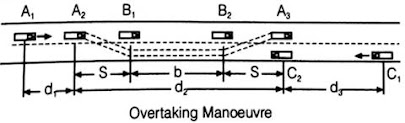
Figure below shows the overtaking manoeuvre of vehicle A travelling at design speed, and another slow vehicle B on a two-lane road with two way traffic. Third vehicle C comes from the opposite direction
- The overtaking manoeuver may be split up into three operation thus dividing the overtaking sight distance into three parts d1, d2 and d3.
- d1 is the distance travelled by the vehicle A during the reaction time t sec of the driver from position A1 to A2.
- d2 is the distance travelled by the vehicle A from A2 to A3 during the actual overtaking operation in time T sec
- d3 is the distance travelled by on-coming vehicle C from C1 to C2 during the overtaking operation of A, i.e, t sec.
- Certain assumptions are made in order to calculate the values of d1, d2 and d3.
In figure A is the overtaking vehicle originally travelling at design speed v m/sec or V Kmph; B is the overtaking or slow moving vehicle move with uniform speed vb m/sec, or Vb Kmph; C is a vehicle coming from opposite direction at the design speed v m/sec, or V Kmph. In two-lane road the opportunity to overtake depends on the frequency of vehicles from the opposite direction and overtaking sight distance available at any instant.
(1). It may be assumed that the vehicle A is forced to reduce its speed to the speed vb of the slow vehicle B and moves behind it allowing a space ‘S’ till there is an opportunity for safe overtaking operation. The distance travelled by the vehicle A1 during the reaction time d1 and is between the position A1 and A2. This distance will be equal to vb × t meter where, ‘t’ is the reaction time of the driver in second.
- The reaction time ‘t’ of the driver may be taken as two second as an average value, as the aim of the driver is only to find an opportunity to overtake. Thus,
s = (0.7 vb + 6), m(2). From position A2, the vehicle A starts accelerating, shifts to the adjoining lane, overtakes the vehicle B, and shifts back to its original lane ahead of B in position A3 in time T sec. The straight distance between position A3 in time T sec. The minimum distance between position A2 and B1 may be taken as the minimum spacing ‘s’ of the two vehicles while moving with the speed vb m/sec. The minimum spacing between vehicles depends on their speed and is given by empirical formula:
d1 = vb × t = 2vb
(2).The minimum distance between B2 and A3 may also be assumed equal to s as mentioned above. If the time taken by vehicle A for the overtaking operation from position A2 to A3 is T second, the distance covered by the slow vehicle B travelling at a speed of vb m/sec.= b = vbT, m
Thus the distance d2 = (b + 2s), m
- Now the time T depend on the speed of overtaken vehicle B and the acceleration of overtaking vehicle A. This time T may be calculated by equating the d2 to (vbT + 1/2aT2), using the general formula for these distance travelled by an uniformly accelerating body with initial speed vb m/sec and ‘a’ is the acceleration in m/sec2
d2 = (b + 2s) = (vbT + aT2/2)
b = vbT, and therefore 2s = aT2/2
Therefore, T = √(4s/a), sec
Where s = (0.7 vb + 6)
Hence, d2 = (vbT + 2s), m
(3). The distance travelled by vehicle C moving at design speed v m/sec during the overtaking operation of vehicle A i.e, during time T is the distance d2 between position C1 to C2.
Hence, d3 = v × T
Thus the overtaking sight distance,
OSD = (d1+d2+d3) – (vb+vbT+2s+vT)
Vb = speed of overtaken vehicle, kmph
t = reaction time of driver = 2secs.
V = speed of overtaking vehicle of design speed, kmph
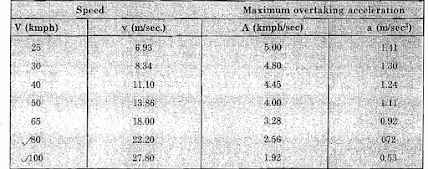
T = √(4×3.6s/A)
s = spacing of vehicles = (0.2 Vb +6)
A = acceleration, kmph/sec.
- In case the speed of overtaken vehicle Vb is not given, the same may be assumed as ( V-16 ) kmph where V is the design speed in kmph or vb = (v – 4.50) m/sec and v is the design speed in m/sec.
- The acceleration of overtaking vehicle is to be specified. Usually this depends on the make of the vehicle, its condition, load and the speed.
- The average rate of acceleration during overtaking maneuver may be taken corresponding to the design speed.
- At overtaking sections, the minimum overtaking distance should be (d1+d2+d3) when two-way traffic exist.
- On divided highways on the road with one-way traffic regulation, the overtaking distance need to be only (d1+d2) as no vehicle is expected from the opposite direction.
- On divided highways with four or more lane, IRC suggest that that it is not necessary to provide the usual OSD; however the sight distance on any way highway should be more than the SSD. (Which is the absolute minimum sight distance).
Effect of grade in overtaking sight distance
On upgrades, the sight distance required would be more due to reduced acceleration of the overtaking vehicle and the likely speeding up of the vehicle from opposing direction. These factors are somewhat compensated by the loss in speed of the overtaken vehicle which may frequently be a heavy truck. No separate design are therefore recommended for application on grades.
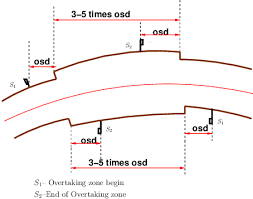
Overtaking zones
Overtaking zones are provided when OSD cannot be provided throughout the length of the highway. These are zones dedicated for overtaking operation, marked with wide roads. The desirable length of overtaking zones is 5 times OSD and the minimum is three times OSD.
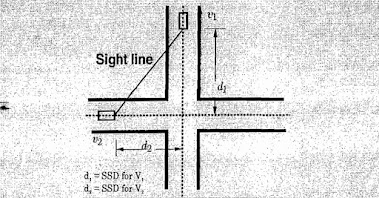
Sight distance at intersection
At intersection where two or more roads meet, visibility should be provided for the drivers approaching the intersection from either sides. Driver should be able to perceive a hazard and stop the vehicle if required. Stopping sight distance for each road can be computed from the design speed. The sight distance should be provided such that the drivers on either side should be able to see each other.
This is illustrated in the figure below